Leider ist der Eintrag nur auf English verfügbar.
Autor: Torsten Gedenk
CANopen Emergency Nachrichten
CANopen Emergency (EMCY) Nachrichten sind ein optionaler Bestandteil des CANopen Protokolls um Fehler in den Geräten zu signalieren.
CANopen Emergency Protokoll
Producer
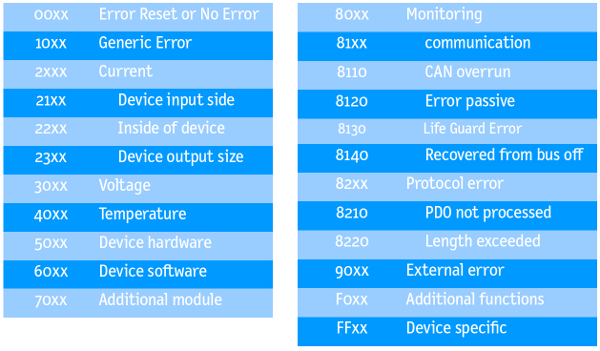
Als Producer werden die Geräte bezeichnet, welche in der Lage sind Emergency Nachrichten zu versendet. Damit können Fehler des Gerätes selbst,des CANopen-Stacks und der CAN-Kommunikation signalisiert werden. Die CANopen Spezifikation 301 definiert eine Menge an vordefinierten Fehlercodes und jedes CANopen-Geräte- oder Applikationsprofil kann weitere Fehlercodes definieren. Darüber hinaus ist es auch möglich herstellerspezifische Fehlercodes zu definieren. Zusätzlich können in den Nachrichten bis zu 5 Bytes hersteller-spezifischer Daten übertragen werden.
Consumer
Consumer sind die Geräte, welche die EMCY-Nachrichten andere Geräte empfangen können. Dies sind meist nur CANopen-Master-Geräte oder Diagnose- und Konfigurationstools.
Telegrammaufbau und CAN-IDs
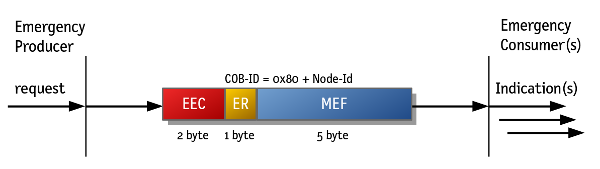
Die Länge einer Emergency-Nachricht ist immer 8 Byte. In den ersten beiden Byte wird der jeweilige EMCY Error Code des Fehlers übertragen. Danach folgt der aktuelle Wert des Error Registers (0x1001) und 5 hersteller-spezifische Bytes.
Die CAN-ID ist entsprechend dem Pre-defined Connection Set 0x80 + die Knotennummer des Producers.
Inhibit Time
Das optionale Inhibit Time Objekt (0x1015) definiert eine minimale Zeitspanne zwischen 2 Fehlernachrichten. Der Defaultvalue des Objekts ist 0 (keine Inhibitzeit) und der Wert kann in Vielfachen von 100µs definitiert werden. Mit einer entsprechenden Konfiguration des Objekts kann der Netzwerk-Master oder Systemintegrator verhindern, dass das CANopen-Netzwerk mit EMCY-Telegrammen geflutet wird.
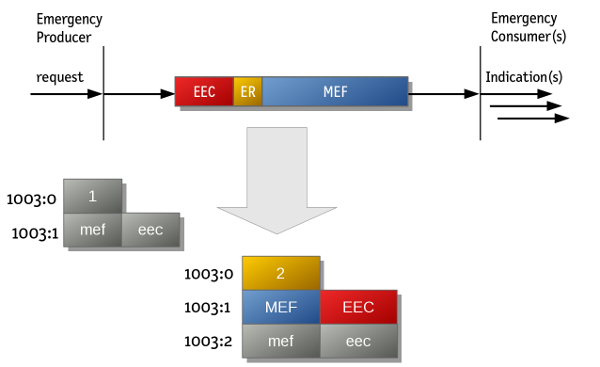
Fehlerhistorie – Objekt 0x1003
Bei jedem EMCY-Producer kann optional das Objekt 0x1003 mit 1 bis 254 Subindizes implementiert werden. Ist das Objekt vorhanden, so dient es als Fehlerhistorie, welche die Fehlercodes alle vom Gerät gesendeten. Dabei wird immer der Error Code und ersten beiden hersteller-spezifischen Bytes in die Fehlerhistorie eingetragen, so dass der jeweils neueste Fehler auf Subindex 1 abgelegt wird.
Vordefinierte Fehlercodes aus CiA 301
Verbreitung
Obwohl die Emergency-Funktionalität optional ist, unterstützen die meisten CANopen-Stacks die entsprechende Producer und Consumer Funktionalität. Aufgrund dessen ist die Emergency-Producer-Funktion auch in vielen CANopen-Geräten implementiert. Auf Protokollebene ist die Implementierung der Producer-Funktionalität nicht sonderlich kompiliziert. Aufwändiger ist dagegen, dass die Erkennung der unterschiedlichen möglichen Fehler in der Applikation.
Tipps
- Implementieren Sie die Emergency-Funktionalität in Ihren CANopen-Geräten.
- Dokumentieren Sie alle Error Codes, welches das Gerät senden kann. Ohne eine Dokumentation unterstützter Fehlercodes, weiß der Anwender z.B. nicht ob ein Fehler nicht auftrat oder nur nicht signalisiert werden kann.
- Implentieren Sie das Inhibit Time Objekt.
EnergyBus Implementierungshinweise
CANopen FD – der Nachfolger von CANopen
CAN FD – die Grundlage von CANopen FD
CANopen FD basiert auf CAN FD, welches eines Weiterentwicklung des seit 1991 in Kraftfahrzeugen verwendeten Bussystems CAN ist.
Unter Beibehaltung der Vorteile von CAN erlaubt CAN FD nun eine höhere Bitrate in der Datenphase mit Werten von bis zu 5 Mbit/s. Zudem sind nun Nutzdaten bis zu einer Länge von maximal 64 Byte möglich. Zur Beibehaltung der Zuverlässigkeit der Datenübertragung wurde die bisherige CRC-Prüfsumme je nach Datenlänge von 15 auf 17 bzw. 21 Bit erhöht. Seit dem Jahre 2015 ist CAN FD zudem in die bestehende ISO-Norm 11898-1 integriert und seit 2017 steht eine größere Anzahl an Mikrocontrollern mit integriertem CAN FD Controllern sowie Standalone CAN FD Controller am Markt zur Verfügung. Zur vereinfachten Migration von CAN zu CAN FD unterstützen alle CAN FD Controller auch das klassische CAN.
Der Weg zu CANopen FD
Um die Vorteile von CAN FD auch außerhalb der Automotive-Welt zu nutzen, haben die die Mitglieder des CAN in Automation e.V. das CANopen Kommunikationsprotokoll zu CANopen FD weiterentwickelt und im Dokument CiA 1301 Version 1.0 spezifiziert. Die Entwicklung begann bereits im Jahr 2012 als im März zur damaligen Internationalen CAN Konferenz Heinz-Jürgen Oertel die ersten Ideen für ein „CANopen auf CAN FD“ vorgestellt hatte. Im Anschluss gründete sich im Rahmen des CiA eine Arbeitsgruppe mit Mitgliedern verschiedener Firmen, um eine Spezifikation für den Nachfolger für CANopen zu erstellen. Diese Arbeiten wurden im Herbst 2017 mit der Freigabe der CiA 1301 Spezifikation abgeschlossen. Dennoch sind auch 2018 noch weitere Aktivitäten zur Umstellung bzw. Anpassung der weiteren Kommunikationsprofile (z.B. 302 und 305) sowie der CANopen-Geräteprofile nötig.
Überblick über CANopen FD
Bei der Weiterentwicklung hat man die grundlegenden Prinzipien von CANopen wie das Objektverzeichnis, eine Parameterliste für alle Prozess- und Konfigurationswerte mit jeweils einem 16-bit Index und einem 8-bit Subindex zur Adressierung, beibehalten. Weiterhin gibt es definierte Dienste zur Übertragung von Prozessdaten, Konfigurationsdaten, Alarm-Notifikationen (Emergency) sowie Dienste zum Netzwerkmanagement und zur Überwachung der Knoten. Die maximale Länge der Prozessdatenobjekte (PDO) beträgt in CANopen FD nun 64 Byte. Damit können Geräte nun längere CAN FD-Telegramme mit mehreren Mess- oder Sollwerten zusammen in einem Telegramm senden. Neben der Erhöhung des Datendurchsatzes erleichtert dies die Synchronisation zusammengehöriger Daten – beispielsweise in Mehrachscontrollern. „CANopen FD – der Nachfolger von CANopen“ weiterlesen
CANopen LSS – Dynamische Knotennummervergabe durch Layer Setting Services
CANopen-Geräte benötigen zur eindeutigen Adressierung für viele CANopen-Dienste eine Knotennummer im Wertebereich von 1 bis 127. Die in CiA-305 definierten Layer Setting Services (LSS) bieten eine Möglichkeit diese Knotennummer dynamisch über CANopen zu vergeben. Dieser Artikel gibt einen Überblick über LSS und stellt die Vorteile von LSS gegenüber anderen Verfahren heraus. „CANopen LSS – Dynamische Knotennummervergabe durch Layer Setting Services“ weiterlesen