EnergyBus – CANopen für Elektrofahrräder
Aktuelle öffentliche Ladegeräte für Elektrofahrräder sind Insellösungen, welche nur mit Rädern eines Herstellers oder Verleihers funktionieren. Für eine breite Akzeptanz von Elektrorädern sind jedoch standardisierte und diebstahlsichere Lösungen notwendig. In diesem Beitrag wird EnergyBus, der zukünftige Standard für Elektrofahrräder, vorgestellt und die technischen Hintergründe erläutert. EnergyBus-Ladestationen werden zur Zeit in einer Pilotregion in Süddeutschland und Österreich erprobt und das neu-entwickelte LadeSchloßKabel vereint zudem die Funktionen Laden und Sichern.
Ladeinfrastruktur als Schlüssel zur Elektromobilität
Auch für Elektroräder ist das Vorhandensein einer flächendeckenden Ladeinfrastruktur der Schlüssel zur Alltagstauglichkeit. Mit flächendeckend verfügbaren Ladenstationen an Haltestellen des öffentlichen Personennahverkehrs, in Einkaufszentren und an touristischen Zielen vermindert sich zudem das Reichweitenproblem der Elektrofahrräder. Als Voraussetzung für eine öffentliche Ladeinfrastruktur gelten standardisierte Steckverbinder und eine definierte Kommunikation zwischen den Elektrofahrrädern und den Ladestationen. Der 2007 gegründete Verein EnergyBus e.V. hat aktuell knapp 70 Mitgliedsfirmen und hat sich zum Ziel gesetzt, einen Standard für die Kommunikation der Komponenten eines Elektrofahrrads zu entwickeln. Die Standardisierung geht über den reinen Ladevorgang hinaus und es werden verschiedene Komponenten von Elektrorädern berücksichtigt. Aktuell steht die Entwicklung vor dem Abschluss und die Spezifikationen werden an die internationalen Standardisierungsorganisationen IEC und ISO übergeben. Seit Sommer 2012 läuft zudem ein vom EnergyBus e.V. und verschiedenen Projektpartnern initiiertes Ladeinfrastruktur-Pilotprojekt im Alpenraum. Dabei werden die EnergyBus-Ladestationen, die Steckverbinder und das Kommunikationsprotokoll zwischen den einzelnen Komponenten der Pedelecs erprobt.
Im folgenden werden die technischen Hintergründe des EnergyBus-Protokolls erläutert.
CANopen für Elektrofahrräder
Zu Beginn der EnergyBus-Entwicklung wurde im Auftrag des EnergyBus e.V. untersucht, welches Medium für die Übertragung der Daten am geeignetsten sei. Dabei standen CAN, LIN, USB, I²C und RS485 zur Auswahl. Die Wahl fiel aufgrund der Flexibilität und Robustheit auf CAN. Da dafür noch ein höheres Protokoll zu definieren war, wurde eine Kooperation mit dem Verein CAN in Automation e.V. eingegangen, welcher CANopen sowie diverse Geräte- und Applikationsprofile pflegt.
CANopen ist ein international standardisiertes Kommunikationsprotokoll für eingebettete Steuerungsnetze, welches aus der Automatisierungstechnik kommt, jedoch inzwischen ein weites Feld von Anwendungsgebieten erschlossen hat. In der Automobiltechnik findet man CANopen bereits bei den Aufbauten für Sonderfahrzeuge für Polizei, Feuerwehr oder Taxis sowie bei verschiedenen Off-Road-Fahrzeugen. Das CANopen-Protokoll bietet eine große Anzahl von standardisierten Diensten. Die wichtigsten davon sind die PDO – die Prozess-Datenobjekte, zur Echtzeitübertragung von Prozessdaten als reine CAN-Nachrichten ohne Protokolloverhead und die SDO – die Service-Datenobjekte zum wahlfreien Zugriff auf alle definierten Parameter eines CANopen-Gerätes. Zudem sind in den CANopen-Kommunikations-und Applikationsprofilen eine Mindestmenge von Parametern(Objektverzeichnis) definiert, welches jede CANopen- bzw. profilkonforme Gerät unterstützen muss. In CANopen-Netzwerken können zudem bis zu 127 anhand ihrer Knotennummer adressierbare Geräte aktiv sein. Die Knotennummern bei CANopen können fest definiert sein oder dynamisch mithilfe des Layer Setting Services (LSS)-Dienstes ähnlich zu DHCP in Office-Netzwerken vergeben werden. CANopen bietet zudem die Möglichkeit Gerätefehler oder auch Alarme über sogenannte Emergency-Nachrichten zu signalisieren. Weitere CANopen-Dienste zur Knotenüberwachung (Heartbeat) oder zur Synchronisation des Datenaustauschs (SYNC) stehen zur Verfügung.
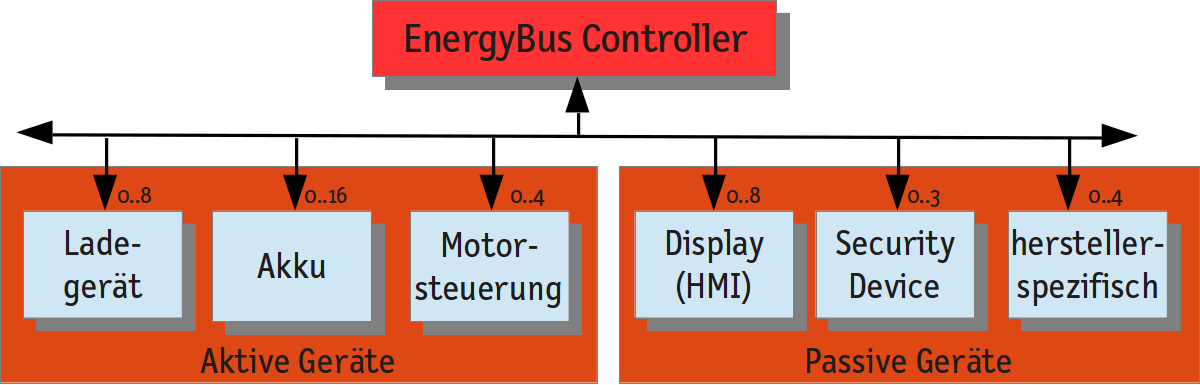
CANopen Applikationsprofile definieren im Gegensatz zu Kommunikations- oder Geräteprofilen eine komplette Anwendung in der Komponenten ohne Neukonfiguration ausgetauscht werden können. Die Applikationsprofile legen somit viele Geräteeigenschaften fest und reduzieren die Flexibilität von CANopen auf das für die Anwendungen benötigte Maß. Die EnergyBus-Kommunikation ist einem solchen CANopen Applikationsprofil definiert. Es definiert eine Menge von virtuelle Geräten mit bestimmten Eigenschaften und Parametern. Ein oder mehrere virtuelle Geräte können wiederum in einem physikalischen Gerät zusammengefasst sein. Folgende virtuelle Geräte wurden bisher definiert:
- Akku
- Ladegerät (Voltage Converter)
- Motorsteuerung(MCU)
- Display(HMI)
- EnergyBus Controller als Netzwerk-Master
- Security Device zur Verriegelung des Pedelecs.
Durch das Konzept der virtuellen Geräte können verschiedene Funktionseinheiten in einem Gerät oder einer Komponente vereint werden. Oft findet man die Motorsteuerung und den EnergyBus Controller in einem Gerät.
Des weiteren definiert das CANopen Applikationsprofil CiA 454 die Parameter im Objektverzeichnis, eine Statusmaschine sowie die in PDOs zu sendenden Prozessdaten, deren Intervall und weitere Eigenschaften. Verschiedene Emergency-Nachrichten zur Signalisierung von Gerätefehlern, die dynamische Vergabe von Knotennummern beim Start per LSS und die maximal mögliche Anzahl der virtuellen Geräte werden ebenso im Standard festgeschrieben. Die Bitrate der CAN-Kommunikation ist auf 250 kBit/s definiert.
EnergyBus-Geräte werden in aktive und passive Geräte eingeteilt (Bild 1). Aktive Geräte wie Akku, Ladegerät oder Motorsteuerung sind mit der Powerline verbunden, wogegen passive Geräte nur über die 12V-Hilfsspannung versorgt werden.
Alle EnergyBus-Geräte müssen die nachfolgenden Parameter (bei CANopen Objekte genannt) beinhalten und über EnergyBus auslesbar bereithalten:
- Unterstützte virtuelle Geräte
- Gerätestatus
- Gerätefähigkeiten (z.B. Limitierung)
- Nennspannung
- Steuerwort
Für beispielsweise einen Akku kommen die Parameter (Objekte) für aktive Geräte hinzu:
- maximaler Eingangs- und Ausgangsstrom
- Maximal- und Minimalspannung
- erlaubte Peak-Werte für Eingangs- und Ausgangsströme
- aktuelle Strom und Spannungswerte
- Anforderung einer Spannungs-/ Strombegrenzung
Und letztlich die Akku-spezifischen Objekte:
- Akku-Typ
- Nennkapazität
- aktuelle Kapazität
- Temperatur
Die EnergyBus-Spezifikation definiert zudem weitere optionale Parameter für jeden Gerätetyp. Für Akkus beispielsweise die einzelnen Zellspannungen und Zellströme, die Anzahl der Tiefentladungen oder die bisher abgegebene Gesamtkapazität. Die optionalen Parameter können die Gerätehersteller zur Verbesserung der Service- bzw. Wartungsfreundlichkeit mit in ihre Komponenten integrieren.
Für andere virtuelle Geräte werden weitere komponenten-spezifische Parameter definiert, die in den EnergyBus-kompatiblen Komponenten implementiert werden müssen. Die Prozessdaten, deren Werte sich im laufenden Betrieb schnell ändern können werden über PDOs übertragen und auf alle anderen Parameter kann mit dem SDO-Dienst zugegriffen werden.
Über die EnergyBus-Schnittstelle können dann die Servicetechniker beim Fahrradhändler auf die einzelnen Parameter lesend zugreifen um eine erste Fehlerdiagnose von EnergyBus-kompatiblen Pedelecs durchzuführen.

EnergyBus Controller als Netzwerkmaster
Der EnergyBus Controller(EBC) mit der Knotennumer 1 ist der zentrale CANopen- und Steuerungsmaster im EnergyBus-Netzwerk. Er ist außerdem für die Konfiguration per SDO und Knotennummernvergabe per LSS aller EnergyBus-Geräte im Netzwerk zuständig. Zudem führt er für jedes Gerät eine Kompatibilitätsprüfung durch und schaltet die Powerline nur frei, sofern alle aktiven Geräte im Netzwerk ihre Bereitschaft signalisieren. Zudem überwacht der EBC zur Laufzeit alle Teilnehmer im Netzwerk und reagiert auf eventuelle Geräteausfälle oder -störungen.
Aus CANopen-Sicht muss der EnergyBus-Controller die Funktionalitäten Netzwerk-Master, LSS-Master mit FastScan, SDO-Client und -Server, Emergency-Consumer, Heartbeat-Consumer und Producer, PDO-Producer und Consumer sowie SYNC-Producer vereinen. Zudem kann das virtuelle Gerät EnergyBus Controller (EBC) auch zusammen mit anderen Geräten implementiert werden. Beim Einsatz zusammen mit einem Ladegerät darf der EBC im Ladegerät(Knotennummer 127) die Masterfunktionalität nur wahrnehmen, wenn kein anderer EBC im Netzwerk vorhanden ist. Dies ist beispielsweise dann der Fall wenn anstatt des kompletten Fahrrad nur ein Akku an die Ladestation angeschlossen wird.
Der Ladevorgang erfolgt im Standardfall (Pedelec an Ladestation) wie in Bild 2 gezeigt:
der EBC im Ladegerät erkennt den EBC im Elektrofahrrad und geht in den „Silent“-Mode
der EBC im Pedelec überträgt statische Daten der Batterie an das Ladegerät und startet den Ladevorgang
Akku und Ladegerät werden an die Powerline zugeschaltet und der Ladevorgang beginnt
der Akku schickt seine aktuellen Werte (Spannung, Strom, Temperatur, Limitierungen, EnergyBus-Zustand, Fehler) per PDO direkt an das Ladegerät
Ladegerät beendet den Ladevorgang wenn die Sollkapazität erreicht ist oder das Ladekabel abgezogen wird.
Neben der Verwendung in Elektrofahrrädern bzw. in allen Elektroleichtfahrzeugen (Light Electric Vehicles) wird das EnergyBus-Protokoll auch zum Energie-Management in stationären Stromnetzen und autarken Energiespeichern eingesetzt. Die zuvor erläuterten Prinzipien kommen dabei ebenfalls zur Anwendung.

Steckverbinder
Neben der Kommunikation wurde auch ein definierter Steckverbinder für EnergyBus-Elektroräder durch den EnergyBus e.V. standardisiert.
Eigenschaften des EnergyBus-Steckverbinders:
- 2 Pins für Versorgungsspannung (Powerline)
- Spannung bis zu 48V
- Stromstärke bis zu 40A
- 1 Pin für 12V Hilfsspannung (für passive Geräte oder zur Aktivierung von tief-entladenen Batterien)
- 2 Pins für die CAN-Kommunikation
- Magnetischer Schutz vor Verpolung
- Abreißen des Steckverbinders ohne Schaden am Fahrzeug oder Ladestation
Laden und Sichern mit dem LadeSchlossKabel
Bisherige öffentliche Ladestationen haben entweder proprietäre Stecker und normale 230-Volt-Schuko-Steckdosen. Letztes klingt zwar auf den ersten Blick sinnvoll, ist jedoch bei genauer Betrachtung eine Gefahrenquelle, da meist die verwendeten Schuko-Steckdosen und alle Heimladegeräte nicht für den Einsatz im Freien vorgesehen und zugelassen sind. Zudem muss der Radler dafür sein Heimladegerät mitführen und das Elektrofahrrad weiterhin mit einem schweren Schloss sichern.
Das LadeSchlossKabel, welches bei der Taipei Cycle Show im März 2013 erstmals der Öffentlichkeit vorgestellt wurde vereint die Funktionen des Ladens und das Anschließen des Elektrofahrrads über eine mechanische Verriegelung (Hardlock). Die Authentifizierung des Eigentümers erfolgt per Passwort oder RFID-Chip.
Da über das LadeSchlossKabel neben dem Stromfluss auch Daten ausgetauscht werden, kann die Ladestation beispielsweise erkennen, wenn das LadeSchlossKabel aufgebrochen wird und einen Alarm auslösen, welcher auch zum Smartphone des Anwenders oder zu einer Überwachungsstelle übertragen werden kann.
Der EnergyBus-Standard zur Verriegelung mit dem LadeSchlossKabel bietet jedoch auch Softlock-Möglichkeiten, so dass einzelne Komponenten im Elektrofahrrad verriegelt werden und nur mit dem richtigen Schlüssel oder beim Händler wieder aktiviert werden können. Dazu muss eine neu gekaufte Komponente beispielsweise ein Ersatzakku oder ein Display an das Fahrrad angelernt werden und ist in der Folge nur an diesem Rad nutzbar, so dass für Diebe unattraktiv wird die Komponenten zu stehlen. EnergyBus bietet diese Möglichkeiten, jedoch muss diese Funktionalität nicht zwingend von jedem Komponentenhersteller unterstützt werden.
Die Kommunikation zur Verriegelung zwischen der Ladestation und den Komponenten des Pedelecs erfolgt mit AES verschlüsselt.
Auch ohne Ladestation lässt sich das LadeSchlossKabel wie ein herkömmliches Fahrradschloss verwenden, so dass der Radler keine separaten Schlösser bzw. Ladeadapter mitführen müssen. Das LadeSchlossKabel liegt in der Gewichtsklasse handelsüblicher Schlösser der Größe und bedeutet somit kein Mehrgewicht für das Elektrofahrrad.
Implementierungsmöglichkeiten
Mit der zunehmenden Verbreitung von des Protokolls stehen zunehmend mehr Zulieferer von Elektrofahrradkomponenten vor der Frage wie EnergyBus in bestehende Komponenten implementiert werden kann. Die EnergyBus-Spezifikation und die darunterliegenden CANopen-Profile sind für alle Mitglieder des EnergyBus e.V. verfügbar. Somit kann jedes Mitglied des Vereins Geräte nach dem EnergyBus-Standard implementieren.
EnergyBus Hardware-Anforderungen
- CPU mit CAN-Controller oder externer CAN-Controller
- CAN-Transceiver nach ISO 11898-2 (Mindestanforderung)
- CAN-Transceiver nach ISO 11898-5/6 (empfohlen)
- Schutzbeschaltung gegenüber Überspannung und Verpolung
- RAM und Flash-Speicher für Kommunikationsstack
Für die Software bieten sich aufgrund des darunter liegenden CANopen-Protokolls die Verwendung eines erprobten CANopen-Stacks an, welche von verschiedenen Anbietern angeboten werden. Zur Vereinfachung der Implementierung bietet die emotas emmbedded communication GmbH mit dem EnergyBus-Framework ein Source-Code-Paket an, welches die CANopen- und EnergyBus-Dienste kapselt. Unter Verwendung des EnergyBus-Frameworks werden durch den Geräteentwickler keine Detailkenntnisse von CANopen und EnergyBus mehr benötigt.
Neben der Arbeit in den Arbeitsgruppen des EnergyBus e.V. und des CAN in Automation e.V. wurden die Resultate in die internationale Normen im Rahmen der ISO und IEC eingebracht. Somit steht einer weiten Verbreitung von EnergyBus in Elektrofährrädern und Ladestationen nichts im Wege.