EnergyBus Ladevorgang
Dieser Artikel beschreibt den EnergyBus Ladevorgang eines EnergyBus Akkus im Zusammenspiel mit einem EnergyBus-Ladegerät mit und ohne EnergyBus Controller. Dabei wird insbesondere auf den Datenaustausch zwischen den Komponenten eingegangen.
Unterschiedliche Anwendungsfälle
Bei EnergyBus sind 2 unterschiedliche Anwendungsfälle zu betrachten. Zum Einen kann eine einzelne Batterie vom Elektrofahrrad getrennt beispielsweise zu Hause geladen werden. Zum Anderen kann ein komplettes Fahrzeug inklusive Batterie an einer öffentlichen Ladestation geladen werden.
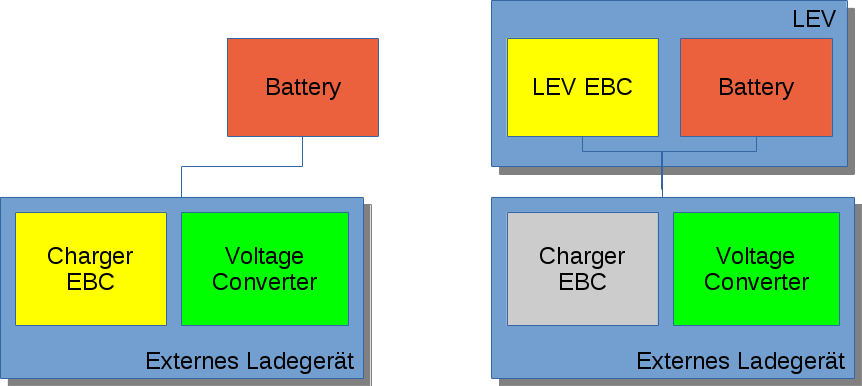
In der EnergyBus-Terminologie bedeutet der 1. Fall (einzelne Batterie), dass im Ladegeräte ein EnergyBus Controller (EBC) vorhanden sein muss. Dagegen ist im 2. Fall der EnergyBus Controller im Elektrofahrrad aktiv und das Ladegerät muss dies erkennen und den eigenen, integrierten EBC deaktivieren.
Ladevorgang mit EBC im Elektrofahrrad
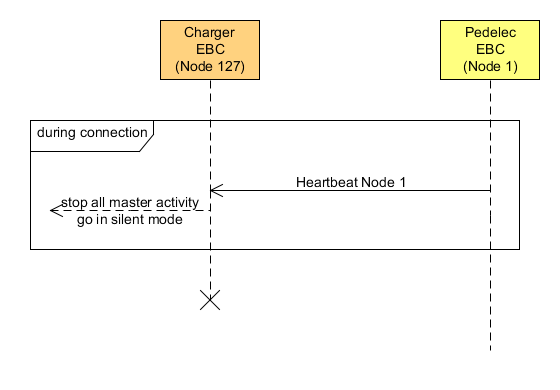
Im diesem Fall muss der EBC im Ladegerät zuerst erkennen, dass ein EBC im Pedelec vorhanden ist und seine EBC-Funktionen deaktivieren. Wie in der EnergyBus-Spezifikation definiert hat der EBC im Fahrzeug die Knotennummer 1. Wenn das Ladegerät nun Heartbeat-Nachrichten des Knoten 1 empfängt, so bedeutet dies, dass ein EBC im Netzwerk ist und das der eigene EBC deaktiviert werden muss.
Der EBC (Knotennummer 1) erkennt ebenfalls, dass ein Ladegerät vorhanden ist, und liest die relevanten Batteriedaten aus der Batterie aus und schreibt diese in das Ladegerät unter Verwendung des CANopen-Dienstes SDO. Diese statischen Batteriedaten sind:
- Global Instance number/li>
- Node-ID of battery
- Device alarm capability
- Type of battery
- rated battery Wh capacity
- max/min voltage
- max current
- max/min temperature
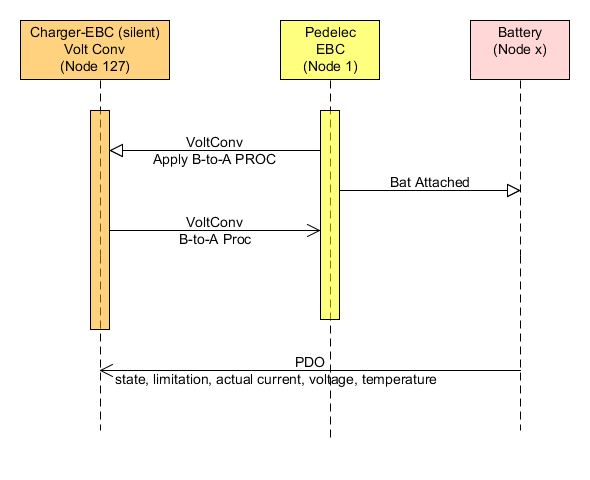
Beim Start des Ladevorgangs wird die Spannung des Ladegeräts zugeschaltet und der EBC fragt das Ladegerät zyklisch ab, welche Aktion(Zuschalten/Abschalten) der Akku ausführen soll. Der EBC schreibt diese Kommandos zyklisch zum Akku. Kritische Prozessgrößen wie beispielsweise Stromstärken, aktuelle Spannung, Batterietemperatur, Limitierungsanforderung und Zustand der Batterie werden zyklisch per PDO von der Batterie direkt zum Ladegerät übertragen.
Ladevorgang ohne EBC
Dieser zu vor als 1. Fall (einzelne Batterie) bezeichneter Fall ist weniger komplex als der andere Fall. Hierbei übernimmt der EBC im Ladegerät die EnergyBus Controller-Funktionen und da sich EBC+Ladegerät in selbem Gerät und in der selben Applikation befinden, ist der Datenaustausch zwischen Batterie und Ladegerät deutlich einfacher.
Hierbei muss das Ladegerät jedoch die LSS-Master-Funktionalität des EBCs übernehmen und dem Akku eine CANopen-Knotennummer zuweisen, so dass die Kommunikation überhaupt möglich ist.
Analyse und Simulation
Die Firma emotas embedded communication GmbH, welche aktiv an der Standardisierung von EnergyBus beteiligt und ein Partner des EnergyBus e.V. ist, bietet beispielsweise eine Reihe von kommerziellen Produkten rund um EnergyBus an. Dazu gehört das kostenfreie EnergyBus Demo-Kit, welches zur Simulation mehrere EnergyBus-Komponenten, darunter, Batterie, Ladegerät und EBC, geeignet ist. Der CANopen DeviceExplorer mit der EnergyBus-Erweiterung dagegen eignet sich zur Interpretation der CAN-Kommunikation zwischen den Komponenten.