The use of the emotas CANopen Stack and the great emotas CANopen DeviceDesigner allows for the development of devices that support up to 512 PDOs in each direction. However, should one wish to utilize more than 4 PDOs in each direction, a number of considerations must be taken into account. Continue reading “Using multiple PDOs with the CANopen DeviceDesigner”
Author: Torsten Gedenk
The ESI bit in CAN FD messages
The ESI bit is a special bit in the CAN FD message. It is located after the BRS bit.
Continue reading “The ESI bit in CAN FD messages”
UDS Basic Firmware Download
The UDS basic firmware download process is the defined sequence of UDS services to download a new firmware to an UDS bootloader. It is the default sequence support both by emotas UDS bootloader and emotas CAN UpdateManager. Additionally, it is supported by the UDS PlugIn for the CDE.
Continue reading “UDS Basic Firmware Download”
CANopen SYNC
SYNC is a special service, which is available both in CANopen and CANopen FD.
The SYNC producer (usually a controller or another device with a precise clock) cyclically transmits a SYNC message, which can be received by other devices (SYNC consumers). These SYNC messages can be used to synchronize anything, but are mostly used to synchronize the PDO transmissions or to synchronize actions.
SYNC configuration objects
The SYNC producer has 2 or 3 objects in its object dictionary to configure the SYNC message:
- 0x1005 – COB-ID Sync: Definition of CAN-ID and if a device is producer or consumer
- 0x1006 – Communication Cycle Period: Time between 2 SYNC messages
- 0x1019 – Synchronous Counter Value: optional object to configure SYNC messages with a SYNC counter
ISO-TP addressing formats
ISO-TP is a transport protocol defined in the ISO-Standard ISO15765-2. It defines a transport layer protocol on top of CAN or CAN FD to transfer payload larger than 8 resp. 64 bytes which is the maximum frame length of CAN resp. CAN FD frames.
Normal addressing
Normal addressing use the CAN identifier only to address a device. Both 11-bit CAN identifiers and 29-bit CAN identifiers may be used.
The definition which CAN identifiers shall be used is not in the scope of the ISO-TP standard, but defined by higher layers using ISO-TP.
Normal fixed addressing
Normal fixed addressing requires the use of 29-bit CAN identifier only. It basically follows the J1939 addressing scheme using the J1939 PGNs 0xDA00 and 0xDB00 and a J1939 priority of 6. The source address is encoded in the lower 8 bit of the CAN ID and the target address is encoded in the bits 8-15 of the CAN-ID.
Extended addressing
Extended addressing extends the normal addressing format by an additional byte. The first byte of the CAN frame is part of the address.
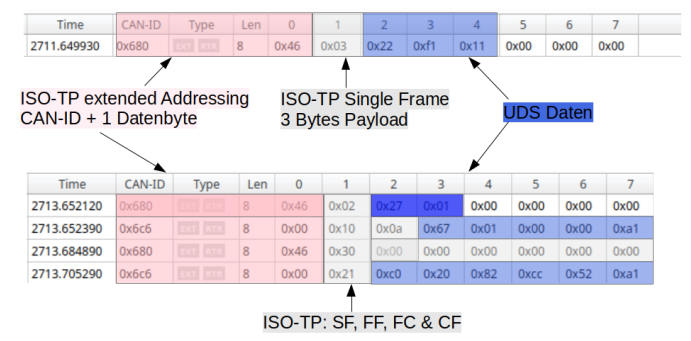
The definition which CAN identifiers and data byte shall be used is not in the scope of the ISO-TP standard, but defined by higher layers using ISO-TP.
Mixed addressing
Mixed addressing is used for remote diagnotics and can be used with both 11-bit CAN IDs and 29-bit CAN-IDs. When using 29-bit CAN-IDs it basically follows the J1939 addressing scheme using the J1939 PGNs 0xCE00 and 0xCD00 and a J1939 priority of 6. The source address is encoded in the lower 8 bit of the CAN ID and the target address is encoded in the bits 8-15 of the CAN-ID.
Additionally, the 1st byte of the CAN frame is used as an address extension.
Known implementations
emotas’ ISO-TP stack supports Normal addressing, Normal fixed addressing and Extended Addressing.